手术机器人初创公司
外科手术的未来:机器人技术与工业设计

这是我们与机器人手术领域一家雄心勃勃的初创公司合作系列的第一部分。第一部分介绍硬件开发,包括工业设计。
在现代外科手术中,先进技术往往分布不均。我们的最新项目,即最先进的机器人手术系统,正是为了解决这一问题。该系统注重人体工程学、精确性和成本效益,力求为现有的、更昂贵的系统提供一种可替代的方法。两年多的密集开发工作是我们迄今为止最大、最复杂的项目,其特点是与专家和合作伙伴的跨学科合作。我们的目标是开发出一套方便用户使用的安全系统,让全世界的外科医生和患者都能从中受益。但事情的结果却并非如此...
任务
- 开发用于微创手术的机器人辅助工作站
- 重点:具有成本效益和方便用户的设计
- 进行可用性优化和验证,确保系统作为医疗设备获得监管部门的批准
- WILDDESIGN 的职责
- 设计、工程和原型制作
- 为开发部门提供设计和工程支持
- 规划和实施用户测试
程序
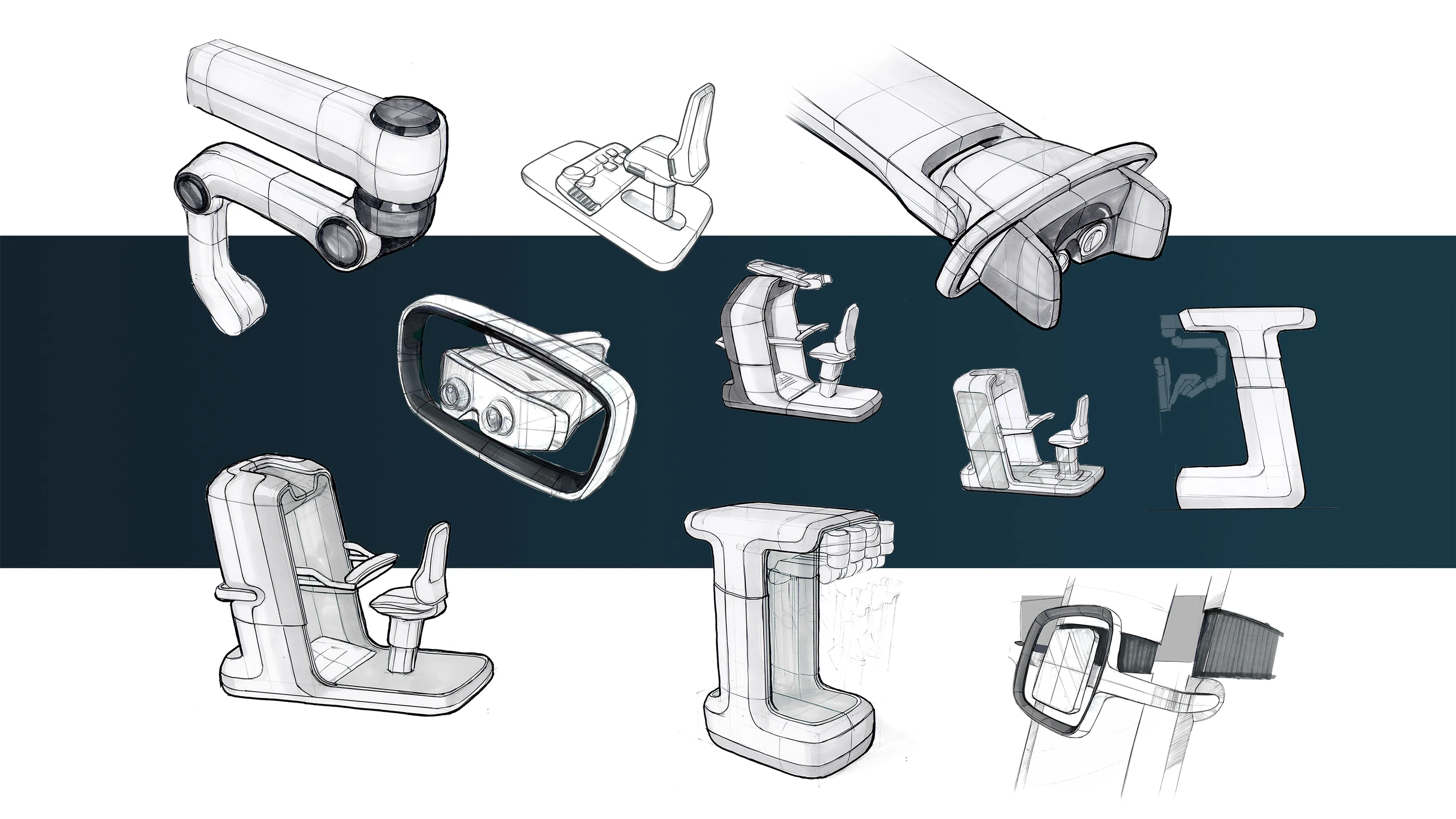
- 在功能原型技术包的基础上创建设计构想
- 开发适用于整个系统的设计语言
- 外形和功能的开发:从草图开始,在 CAD 中进行细节设计,通过快速模型和复杂的功能原型进行验证
- 与客户密切合作,每周举行会议
结果
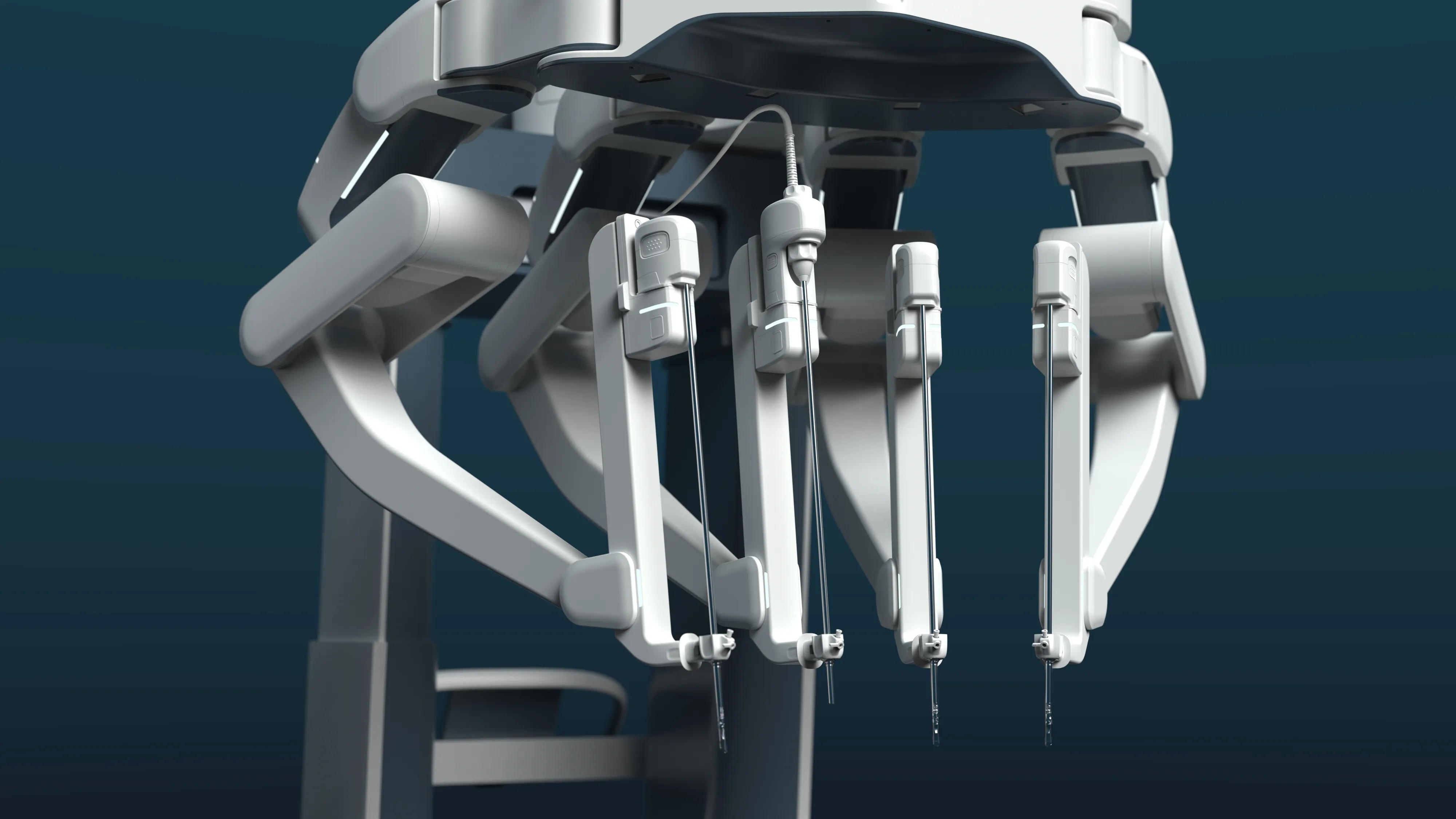
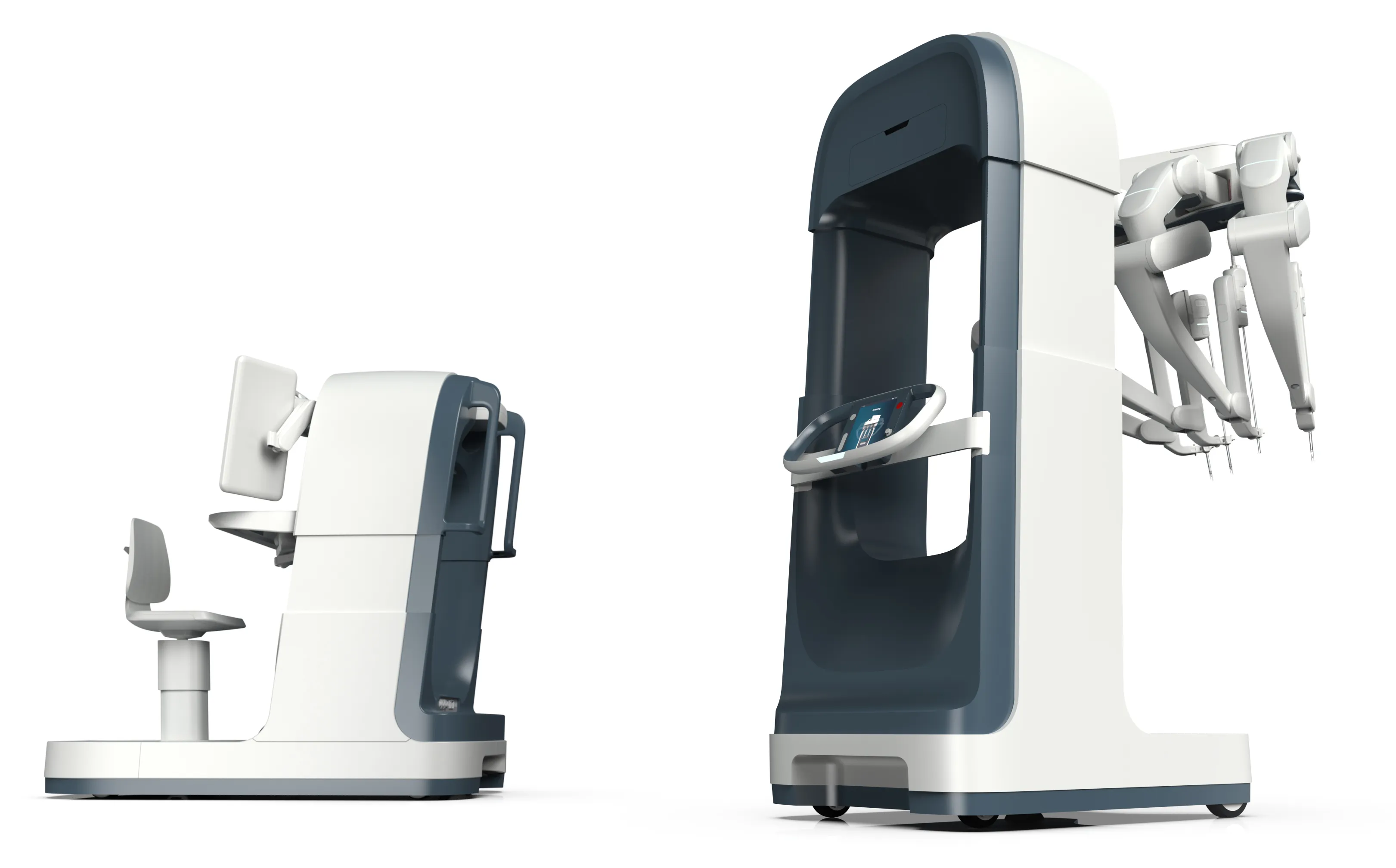
- 由控制单元、机器人单元和装置塔三部分组成的整体系统
- 专用机械臂:腹腔镜器械和内窥镜,旨在高度移动和节省空间
- 符合人体工程学的工作方式,手术室内的视野更开阔,准备和后期处理更快捷
- 激发信心的精密设计,在竞争中脱颖而出
精确、符合人体工程学、易于使用
我们与客户和许多专业合作伙伴密切合作,历时两年多为现代机器人辅助手术系统开发组件、接口和设计界面。该系统必须符合人体工程学,具有成本效益,并适用于不同的环境和医疗系统。其中的核心部件是低成本的远程操纵器,它可以实现高精度的微创介入。无数次的测试和迭代确保了该系统既能满足最高的临床要求,又易于使用。
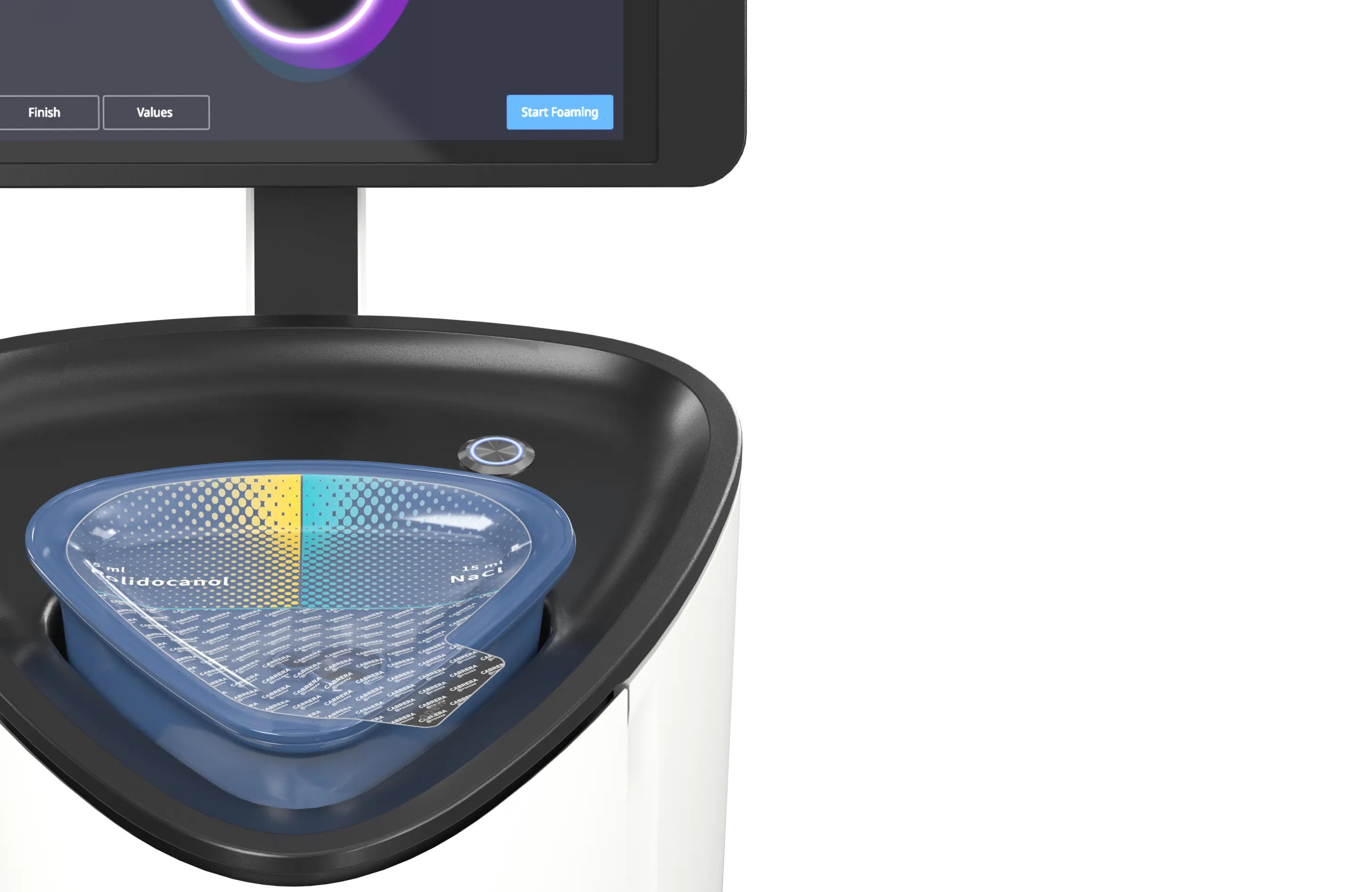
量身定制的用户体验:可定制且直观
该系统旨在优化手术室的工作条件。外科医生可以根据个人需求灵活定制界面。功能和屏幕布局可以保存,以确保高效使用。精确的信息显示和直观的菜单促进了手术室内的协作,使外科医生和手术团队之间的沟通更加顺畅。

适合长时间操作的人体工学设计
专门开发的控制装置使外科医生即使在长时间的手术过程中也不会感到疲劳。使用人体工程学模型进行的定期测试和反馈循环表明,工作条件可以在一次又一次的迭代中得到明显改善。这将有助于提高注意力和精确度,从而进一步改善手术的安全性。
手术民主化:克服资金障碍
该系统旨在打破资金障碍,即使在资源匮乏的医疗系统中也能提供高质量的外科护理。通过使用低成本材料和高效率生产,我们能够提供一种许多诊所都能使用的解决方案。微创手术的平民化可以为更广泛的病人护理开辟新的途径。
手术室的安全和效率
日常手术的安全性是开发过程的关键目标。从简单的人体工学模型到复杂的原型,该系统与医疗专业人员合作进行了广泛的测试。最终,该解决方案在日常临床实践中实现了精确和高效。

设计动态:一个综合系统
机器人手术系统已成为一个无缝集成的生态系统。从控制单元到手术工具,所有组件都实现了最佳的相互协调。这种集成不仅确保了高效的工作流程,还为手术室提供了用户友好和安全的环境。

设计演变:通过用户反馈取得进步
通过与外科医生和手术室团队的定期反馈循环,该系统得到了不断发展。每一次迭代都带来了切实的改进,使创新技术得以无缝集成,用户友好性得以优化。虽然项目尚未最终完成,但我们开发的系统在精确度、成本效益和灵活性方面都向前迈出了明显的一步,并在关键方面从现有解决方案中脱颖而出。

WILDDESIGN 部分
设计愿景
- 产品和设计概念
- 全系统设计语言和 CMF(颜色、材料、饰面)
- 设计分析(市场、趋势、系统分析)
- 构思和设计物理和数字用户界面
- 准备、实施和记录可用性测试

"尽管项目没有一直进行到最终实施,但敏捷开发过程对我们来说是一次很好的体验。从定义、设计、构建到测试,我们都获得了宝贵的见解。我们能够快速开发原型并利用虚拟模拟,这使我们能够得出重要结论并在早期阶段做出调整。这种灵活性和迭代方法向我们展示了对新发现做出快速反应的重要性。该项目持续增强了我们在机器人手术领域的专业知识"。
下一代医疗设计














.webp)